| 悪杮揹婥僔僗僥儉僜儕儏乕僔儑儞 |
090-0000-0000
|
|---|
|
悪杮揹婥僔僗僥儉僜儕儏乕僔儑儞 仹 戝嶃晎嶄巗杒嬫 揹榖丗090-0000-0000 
|
僒乕儃偺揹婥惂屼僒乕儃儌乕僞乕偲偼暔懱偺埵抲傪惂屼検偲偟偰丄栚昗抣偵捛廬偡傞傛偆偵帺摦偱嶌摦偡傞儌乕僞乕偱偡丅
僒乕儃傾儞僾 偲偄偭偰傕擄偟偔偁傝傑偣傫丅 娙扨偵尵偊偽扨弮偵儌乕僞乕傪俷俶丒俷俥俥偡傞偺偱偼側偔丄 壗倣倣摦偗偲偄偭偨埵抲傪巜掕偟偰摦偐偡偙偲偑偱偒傞儌乕僞乕偱偡丅 俹俴俠偱僒乕儃儌乕僞乕傪摦嶌偝偣傞偲偒偼丄俹俴俠仺僒乕儃傾儞僾仺僒乕儃儌乕僞乕偺弴斣偱柦椷偟傑偡丅 摉曽偼嶰旽揹婡丄僉乕僄儞僗丄僆儉儘儞偺僒乕儃傪惂屼偡傞僔僗僥儉傪奐敪偟偨幚愌偑偁傝傑偡偑丄崱夞偼弶怱幰偱傕暘偐傝傗偡偄僉乕僄儞僗偺僒乕儃惂屼傪徯夘偟傑偡丅 僉乕僄儞僗偺僒乕儃傾儞僾偼俲倁亅俵俷俿俬俷俶偲屇偽傟傞俹俠僜僼僩偱僾儘僌儔儉傪彂偔偙偲側偔丄懍搙傗摦偒偺愝掕偑偱偒傑偡丅 俹俴俠偱慻傓僾儘僌儔儉偼僨乕僞儊儌儕偱埵抲傪巜掕偟丄僒乕儃傾儞僾偵僒乕儃摦嶌柦椷傪峴偆偩偗偱偡丅 昐暦偼堦尒偵偟偐偢偲偄偆偙偲偱丄僾儘僌儔儉傪尒偰傕傜偄傑偡丅 (俹俴俠偵愙懕偡傞僒乕儃儌乕僔儑儞儐僯僢僩偼俲倁亅俵俴侾俇倁丄僒乕儃傾儞僾偼俽倁傪巊梡丅) 丒僒乕儃揹尮俷俶
伀夋憸傪Click偱奼戝伀 嶰旽揹婡偺俹俴俠偱偄偆倃斣崋(擖椡)丒倄斣崋(弌椡)偼丄僉乕僄儞僗偺俹俴俠偱偼俼斣崋(擖椡丒弌椡偲傕)偵側傝傑偡丅 傑偨俴俼斣崋偼儔僢僠儕儗乕偲屇偽傟丄嶰旽揹婡偺俹俴俠偱偄偆俵斣崋偱揹尮傪愗偭偰傕俷俶丒俷俥俥偺忬懺傪曐帩偟偰偄傞儕儗乕偱偡丅 俠俼俀侽侽俀偼忢帪俷俶偺摿庩儕儗乕(忢偵愙揰偼宷偑偭偰偄傑偡)偱偡丅俼侾侾俇侽侽(摦嶌嫋壜)丄俼侾係侾侾俁(幉侾僒乕儃俷俶)偼丄 俹俴俠偺僒乕儃儌乕僔儑儞儐僯僢僩(俲倁亅俵俴侾俇倁)偺愝掕帪偵帺摦偱妱傝怳傜傟傞斣崋偱偡丅 仸埲壓摨條偱偡偑丄僒乕儃惂屼偵巊梡偡傞俼斣崋偼僒乕儃儌乕僔儑儞儐僯僢僩偺愝掕帪偵帺摦妱傝怳傝偝傟傑偡丅 偙偺俼斣崋偼愝掕偵傛偭偰斣崋偑曄傢傝傑偡偺偱丄偛拲堄偔偩偝偄丅 偙偺僒僀僩偺俼斣崋偼偁偔傑偱傕堦椺偲偟偰偔偩偝偄丅 偳偺斣崋偺偳偺儕儗乕偐偼俲倁亅俵俴侾俇倁偺儅僯儏傾儖偵昞偑偁傝傑偡丅 偙偺僾儘僌儔儉偱偼傑偢俹俴俠婲摦帪偵僒乕儃偺揹尮傪俷俶偵偟偰偄傑偡丅 丒埵抲寛傔偺抣傪僒乕儃傾儞僾偵愝掕
伀夋憸傪Click偱奼戝伀 俀侽侽倣倣偺埵抲偵堏摦偡傞傛偆抣傪僒乕儃傾儞僾偺栚昗埵抲奿擺僶僢僼傽椞堟偵彂偒崬傫偱偄傑偡丅 倀倂俼俬俿柦椷暥偼僶僢僼傽傾僪儗僗18016(奐巒億僀儞僩斣崋侾偺栚昗埵抲奿擺椞堟)偵丄 僨乕僞儊儌儕俢俵俆侽侽偵奿擺偝傟偰偄傞抣丗俀侽侽傪彂偒崬傓柦椷偱偡丅 仸僉乕僄儞僗偺僨乕僞儊儌儕偼俢俵斣崋偵側傝傑偡丅傑偨僶僢僼傽傾僪儗僗傕俲倁亅俵俴侾俇倁偺儅僯儏傾儖偵昞偑偁傝傑偡丅 埵抲寛傔偺扨埵倣倣偼俲倁亅俵俷俿俬俷俶偱愝掕偟傑偡丅 丒埵抲寛傔巜椷
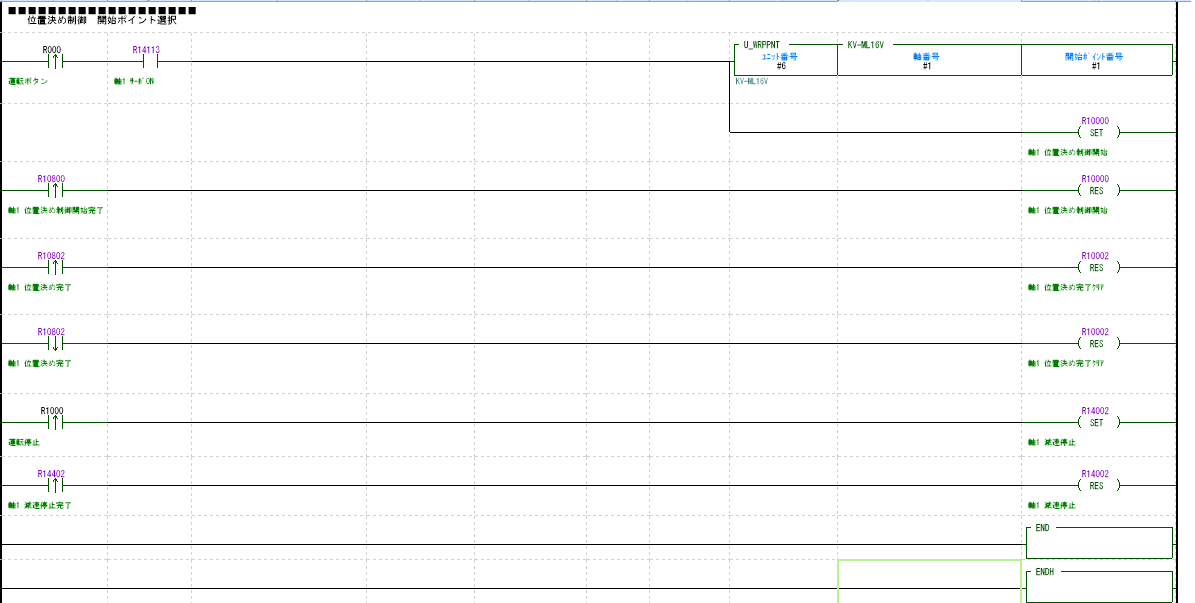
伀夋憸傪Click偱奼戝伀 俼侽侽侽(擖椡)傪塣揮奐巒儃僞儞丄俼侾侽侽侽(擖椡)傪塣揮掆巭儃僞儞偲偟偰偄傑偡丅 倀丵倂俼俹俹俶俿柦椷暥偱栚昗埵抲奿擺偟偨奐巒億僀儞僩斣崋侾傪愝掕偟丄 僒乕儃埵抲寛傔惂屼奐巒儕儗乕俼侾侽侽侽侽傪俷俶偟偰偄傑偡丅 偙傟偱僒乕儃偑俀侽侽倣倣偺埵抲偵堏摦偟傑偡丅 仸俽俤俿柦椷暥偼堦搙儕儗乕傪俷俶偟偨傜丄俼俤俽柦椷傪峴偆傑偱俷俥俥偵側傝傑偣傫丅 埵抲寛傔惂屼奐巒梫媮傪僒乕儃傾儞僾偑庴偗晅偗偨傜乮俼侾侽俉侽侽偱敾抐乯丄俼侾侽侽侽侽傪俷俥俥偵偟偰偄傑偡丅 仸埵抲寛傔姰椆(亖俀侽侽倣倣偺埵抲偵堏摦姰椆)偟偨傜丄俼侾侽俉侽俀偑俷俶偟傑偡丅偦偺帪揰偱俼侾侽侽侽俀傪俷俥俥偵偟傑偡丅 (偙傟偼偍寛傑傝偱偡偺偱怺偔峫偊側偄偱偔偩偝偄丅) 塣揮掆巭偟偨偄偲偒偼尭懍掆巭儕儗乕俼侾係侽侽俀傪俷俶偵偟傑偡丅 丒僒乕儃傪摦嶌偝偣傞偩偗偺僾儘僌儔儉偼儚儞僷僞乕儞忋婰徯夘偟偨僒乕儃僾儘僌儔儉偼幚偼丄俲倁亅俵俴侾俇倁偺儅僯儏傾儖偺僒儞僾儖僾儘僌儔儉偲傎偲傫偳摨偠偱偡丅 僒乕儃傪摦偐偡偩偗偺僾儘僌儔儉偼寛傑傝寛傑偭偨儚儞僷僞乕儞僾儘僌儔儉偵側偭偰偄傑偡丅 乮偳偺傛偆偵墳梡揑偵摦偐偡偐偑丄揹婥惂屼媄弍幰偺愝寁椡偺尒偣強偱偡丅乯傑偨摨婜惂屼(椺丗僒乕儃儌乕僞乕幉侾偲幉俀傪摨婜偟偰摦嶌偝偣傞惂屼)傕僒儞僾儖僾儘僌儔儉偲愝掕偱偱偒傑偡丅 徻偟偔偼俲倁亅俵俴侾俇倁偺儅僯儏傾儖傪嶲徠偔偩偝偄丅
Produced by 柍椏偱儂乕儉儁乕僕傪嶌惉偟傛偆
|