| 杉本電気システムソリューション |
090-0000-0000
|
|---|
|
杉本電気システムソリューション 〒 大阪府堺市北区 電話:090-0000-0000 
|
ラダー・ロジックとは何かラダー・ロジックとはラダー図・ラダー言語とも呼ばれ、PLCのプログラムを組むときに使用されます。プログラムが2本の並行するレール(母線。どちらか一方を+、どちらか一方を−の電極と考えると初心者はわかりやすい)と その間に渡される接点・コイルで構成されます。百聞は一見にしかず、ということで三菱電機Qシリーズのプログラムを画像で示します。・ラダーの基本要素はa接点、b接点、コイル 以上!!
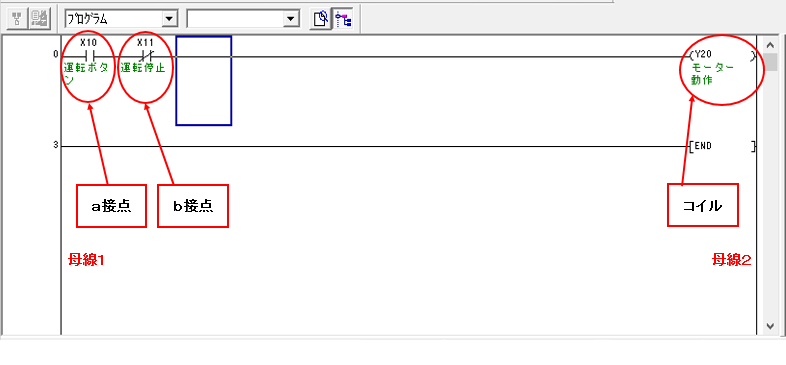
↓画像をClickで拡大↓ 「母線1と母線2が繋がればコイルに電気が流れる。」 この説明が初心者に理解しやすいと思います。
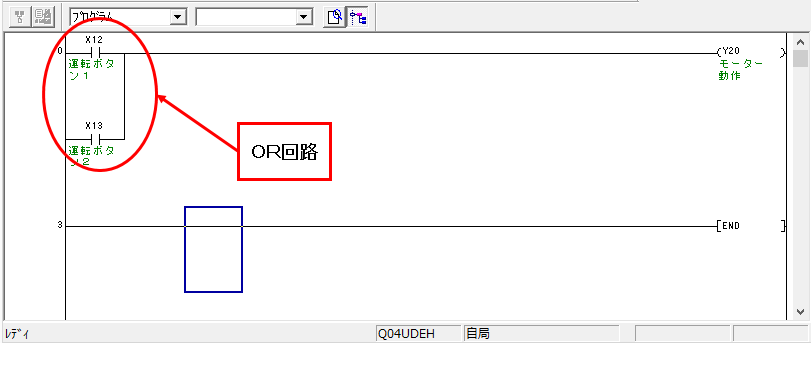
この図ではコイルにPLCの出力ポート(Y20)を指定しています。 Y20にモーターが接続されていると考えてください。 また入力ポートX10に運転ボタン、入力ポートX11に運転停止ボタンを接続しています。 したがって、このプログラムは「運転ボタンを押す」かつ「運転停止ボタンを押さない」でモーター動作するプログラムになります。 2つの接点(=スイッチ)が閉じて初めて電気が流れますので、AND回路といいます。 それに対して、運転ボタン1あるいは運転ボタン2(それぞれX12、X13とします。)のどちらかが押されたときに モーターを回したいときは以下のOR回路のようにします。
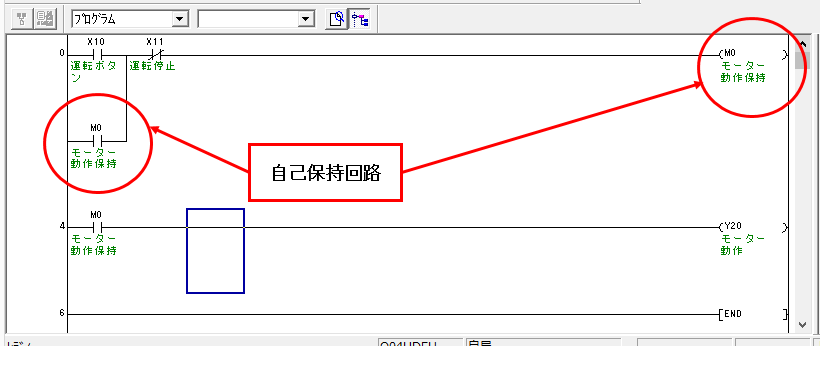
↓画像をClickで拡大↓ X12、X13のどちらかのスイッチが閉じれば、母線1と母線2が繋がってコイルに電気が流れますよね〜。 ・ラダーの2番目の基本は自己保持回路!!上の2つのプログラムでは、押している時だけへっこむボタン(モーメンタリー動作するボタンといいます。)のときは、 どちらもボタンをずっと押し続けないとモーター動作しません。 一度運転ボタン(X10)を押すとモーター動作し、運転停止ボタン(X11)でモーター停止するプログラムは以下のようにします。
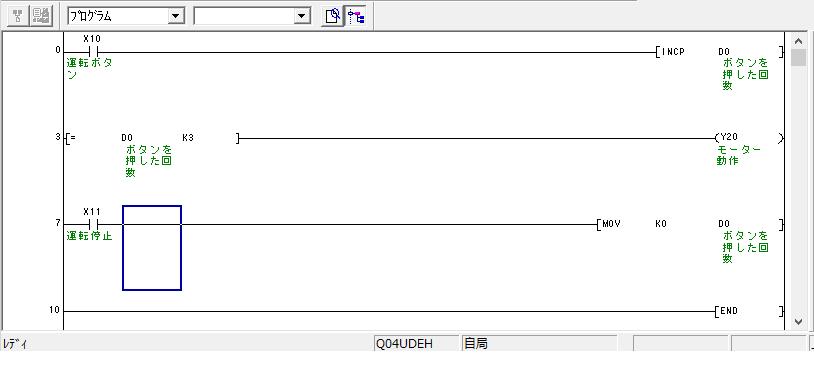
↓画像をClickで拡大↓ M番号はX番号(入力)、Y番号(出力)とは別の補助リレーと呼ばれるものです。 M0は1行目のプログラムでコイルがONすると、2行目と3行目のM0のa接点のスイッチが繋がります。 一度、運転ボタン(X10)を押すとM0がONになり、2行目のM0のa接点のスイッチが繋がりますので、 たとえX10のスイッチが離れてもM0はONのままです。これを自己保持回路といいます。 3行目でM0がONのときはY20がONになりモーター動作します。 また運転停止ボタン(X11)を押すと、X11のb接点が離れますので、M0もY20もOFFになりモーター停止します。(自己保持解除) ・ラダーにも変数がある?!上のプログラムでは単純にスイッチをON、OFFしてモーターあるいはランプに電気を流すことしかできませんが、 普通のプログラミング言語みたいに数値比較をしてモーターを動作させることもできます。 運転ボタン(X10)を3回押すとモーター動作し、運転停止ボタン(X11)を押すと停止するプログラムは 以下の図となります。
↓画像をClickで拡大↓ プログラミング言語の変数に該当するものはデータメモリ(D番号)と呼ばれます。 上のプログラムはINCPという命令文で、X10がONするタイミングでD0の値を1ずつ増やし、 D0が3になればY20をONにしてモーターを回します。 ※INCPはC言語でいうとインクリメント命令(++)です。 押した回数をリセットするにはX11を押して MOV命令文でD0を0にします。 ※MOVはC言語でいうと代入命令(=)です。数字の前のKは10進数の意味。 なお上のプログラムは不完全です。はじめにD0を0に初期化する必要があります。いわゆる変数の初期化が漏れています。 ・上記知識だけでPLCのプログラムは書ける!!
Produced by 無料でホームページを作成しよう
|